Genial gedacht – genial gemacht: Mit Spirale zum Patent
Patentierter Greifer für die automatisierte Leersackbündel-depalettierung:
KOCH liefert innovative Lösung – erstmals erfolgreich umgesetzt bei Salonit Anhovo
Overview
Manche Innovationen starten mit einem Problem − und werden mit einem Patent belohnt. In diesem Fall war es ein Greifer für die Depalettierung von Leersäcken, den KOCH Robotersysteme exklusiv für die neue Abfüllanlage von Salonit Anhovo entwickelte. KOCH brachte die Technologie für den Depalettierungsprozess in diesem Projekt auf ein neues Level, sodass dieser innovative Ansatz den Unterschied machte − und das Ganze sogar zum Patent führte.
Aber erst mal zurück zum Anfang − dorthin, wo Technik noch eine Idee war:
Gleich zu Projektbeginn stand für Salonit fest: Für die komplexe Leersackbündeldepalettierung musste ein Partner ins Boot, der nicht nur die Technik beherrscht, sondern auch die Herausforderungen des Materials und der Abläufe versteht. Die Wahl fiel somit auf KOCH. „In der Zusammenarbeit mit KOCH schätzen wir besonders das technische Verständnis und die Fähigkeit, sich in die individuellen Kunden-Anforderungen hineinzuversetzen. Hinzu kommt das Können, auch aus herausfordernden Situationen passgenaue Lösungen zu entwickeln. Die Kommunikation ist dabei stets offen, ehrlich und lösungsorientiert – genau das macht für uns ein erfolgreiches Projekt aus“, erklärt das Team von Salonit Anhovo.
Die Herausforderung
Die Herausforderung für das Projekt bei Salonit Anhovo war eindeutig: Die manuelle Depalettierung der Leersackbündel durch die Mitarbeitenden war nicht nur zeitintensiv, sondern auch ein entscheidender Flaschenhals im gesamten Produktionsprozess. Insgesamt sollte der komplette Abfüllprozess – von der Sackbereitstellung bis hin zur Befüllung und Verpackung – automatisiert werden.
Enger Takt, hohe Last – und null Spielraum
Ein zentraler Fokus lag somit auf der Prozesssicherheit und der hohen Verfügbarkeit der Anlage. Ziel war es, die Eingriffe der Bedienerinnen und Bediener auf ein Minimum zu reduzieren – und dennoch eine durchgängig stabile Produktion sicherzustellen, bei der die Anlage über längere Zeiträume hinweg unterbrechungsfrei läuft. Gleichzeitig galt es, ambitionierte Anforderungen an den Depalettierungsroboter zu erfüllen: Depalettiert werden sollten Paletten, die mit 435 bis 500 Leersackbündeln bestückt sind – das entspricht 83 bis 87 Lagen pro Palette. Und diese Leersäcke mussten in einer Geschwindigkeit von 4.000 bis 6.000 Stück pro Stunde verarbeitet werden. „Die vorhandene Absackmaschine ist eine Hochleistungsmaschine“, betont Stephan Boll, Projektleiter bei KOCH. „Das bedeutet für uns: Alle 8,5 Sekunden muss der Roboter ein Bündel Leersäcke greifen und dem Prozess zur Verfügung stellen – inklusive Positionierfahrt und Greifvorgang. Eine echte Herausforderung.“
Hinzu kam: Die angelieferten Paletten wiesen keine standardisierte Struktur auf. Die Paletten waren weder umreift noch foliert, wodurch die Leersackbündel während des Transports verrutschen konnten. „Teilweise kamen Paletten an, bei denen die oberen Bündel um bis zu 150 Millimeter verschoben waren – das sah teilweise aus wie der schiefe Turm von Pisa“, erinnert sich Andreas Lehmler, Abteilungsleiter der Konstruktion und mechanischen Entwicklung bei KOCH. Für die Greifertechnik bedeutete das: höchste Präzision beim Positionieren und Aufnehmen war gefragt – auch bei unregelmäßigen und engen Palettierbildern.
Kein Platz – aber volle Funktion
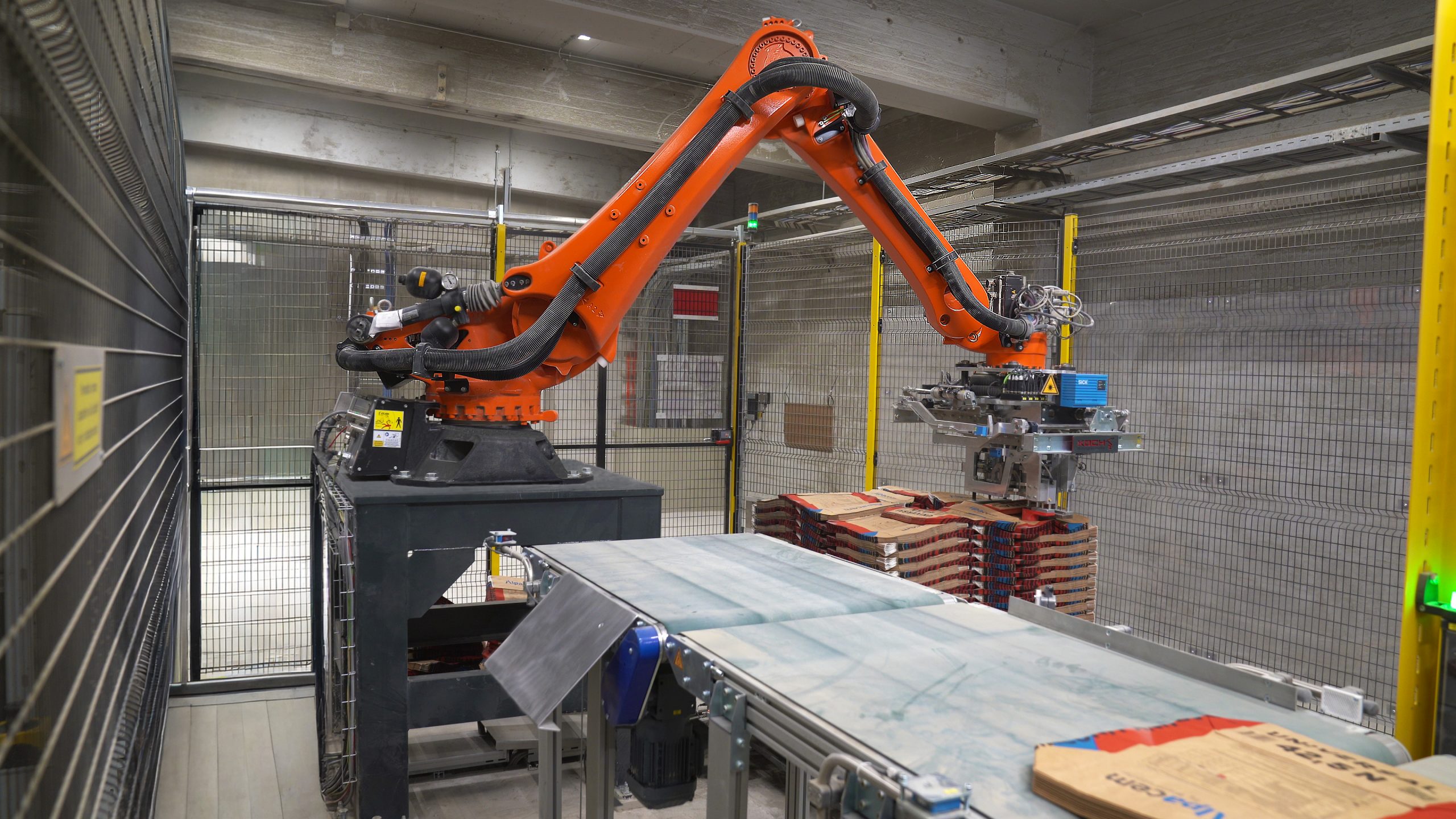
Ein zentraler Knackpunkt war zudem der Depalettierbereich. Zum einen mussten strenge Platzvorgaben eingehalten werden – unter anderem aufgrund von Unfallverhütungsvorschriften und der angrenzenden Hochleistungs-Absackmaschine. Diese definierte exakt, wie viel Raum für die vorgelagerte Depalettierung zur Verfügung stehen durfte. Eine Lösung war also gefragt, die sich nahtlos in das bestehende Layout integrieren ließ – kompakt, effizient und störungsfrei.
Trotz dieser widrigen Voraussetzungen musste die Lösung in der Lage sein, komplette Bündel aufzunehmen – ohne einen einzigen Sack zurückzulassen, ohne Verdrehungen, die den Zuführprozess zur Absackmaschine stören könnten, und ohne Beschädigungen an den empfindlichen Papiersäcken.

Ein Detail wird zur Schlüsselstelle
Eigentlich hätte KOCH es sich bei diesem Projekt leicht machen können: Einfach den Robotergreifer aus einem früheren Auftrag übernehmen – denn dort wurde bereits ein Greifer entwickelt, der Leersäcke von der Palette auf ein Förderband depalettiert – exakt die Aufgabe, die auch jetzt gefragt war.
Doch wie so oft steckt die Herausforderung im Detail – oder genauer gesagt: in der letzten Lage. Der vorhandene Greifer war nicht in der Lage, die unterste Schicht der Bündel zuverlässig aufzunehmen. Im damaligen Projekt war das kein großes Drama: Die letzte Lage wurde ganz einfach per Hand umgeschichtet – zumal ohnehin Mitarbeitende vor Ort waren, um die Paletten manuell zum Entpalettierplatz zu bringen. Im aktuellen Auftrag bei Salonit Anhovo war das jedoch keine Option: Hier sollte – wie eingangs bereits erwähnt – alles wie am Schnürchen laufen, vollautomatisch und ohne Unterbrechung. Ein manueller Eingriff – nur um die letzte Lage abzuräumen – war von vornherein ausgeschlossen. „Für uns war klar: Wenn wir automatisieren, dann kompromisslos – nicht halbautomatisch, nicht mit Nacharbeit. Es musste durchgängig funktionieren“, so Salonit Anhovo.
Damit war auch klar: Die bislang eingesetzte, konventionelle Greiftechnik – ein sogenannter Schnabelgreifer – würde den Anforderungen nicht genügen. Das System erfordert ausreichend Freiraum unterhalb der Bündel, um mit dem Greifmechanismus darunter eintauchen zu können. Doch genau dieser Platz fehlte auf den dicht gepackten Paletten.
Gleichzeitig war der Schnabelgreifer für elastischere Materialien ausgelegt – die vergleichsweise steifen Papiersäcke ließen sich mit dieser Technik weder zuverlässig noch materialschonend greifen. Denn um ein Bündel aufzunehmen, müsste der Greifer unter das Produkt eintauchen – doch ohne die notwendige Flexibilität der Bündel und den dafür erforderlichen Raum war das technisch schlicht nicht machbar. Erschwerend kam hinzu, dass der gesamte Greifvorgang zu viel Zeit in Anspruch nahm: Die aufwändige Flügelbewegung des Greifers hätte die geforderte Zykluszeit von 8,5 Sekunden pro Bündel unmöglich gemacht.
Ein weiterer Punkt, der die Entwicklung erschwerte, war die Umgebung selbst. „Wir sprechen hier von einem Zementwerk – extrem staubig, im Winter kalt, im Sommer brütend heiß“, beschreibt Stephan Boll die Bedingungen. „Das sind keine idealen Voraussetzungen für sensible Automatisierungstechnik – die Anlage musste robust und widerstandsfähig konstruiert sein.“
Die Aufgabe war nun, einen Greifer zu entwickeln, der alle Lagen eines Leersackbündels zuverlässig aufnehmen konnte – und das Ganze natürlich streng nach Vorschrift, was Platzierung und Sicherheit angeht. Klingt nach einer Kleinigkeit? War’s nicht. Die Konstruktion war technisch anspruchsvoll, erforderte jede Menge Tüftelei. Wie genau diese Lösung aussieht – und warum sie sogar patentiert wurde, wird im nächsten Kapitel Die Lösung beschrieben.
Die Lösung
Meistens entstehen die besten Ideen direkt am Produkt. Deshalb fand der erste Kick-off auch direkt an der Palette mit dem Musterprodukt statt. Und danach war schnell klar: Die Aufgabenstellung mit ihren speziellen Anforderungen verlangte Kreativität – und die Bereitschaft, auch mal unkonventionelle Wege zu gehen. Also setzte sich ein bunt gemischtes Team aus Konstruktion, Vertrieb und Projektleitung zusammen – und brütete gemeinsam über der Gretchenfrage: Wie kriegen wir die Säcke möglichst sicher und beschädigungsfrei vereinzelt?
Die Spirale zum Erfolg
Die zündende Idee? Kam mitten im Alltag – zwischen Schreibtisch und Produktionshalle – entdeckte Andreas Lehmler plötzlich eine Druckfeder. „Ich dachte mir: Mensch, das könnte doch funktionieren!“, erzählt er lachend. Und so wurde aus einer ganz gewöhnlichen Spiralfeder die vielleicht unkonventionellste, aber wirkungsvollste Lösung im ganzen Projekt.
Denn das Prinzip war bestechend einfach: Die Feder „schält“ die Leersäcke Schicht für Schicht von der Palette – ganz ohne, dass sie beschädigt oder verdreht werden. Die Idee hatte in Lehmlers Kopf übrigens schon länger geschlummert. „Ich hatte da immer diese archimedische Spindel im Kopf – die Idee, wie man Wasser die Steigung hochfördert. Warum also nicht auch Leersäcke?“, sagt er mit einem Augenzwinkern. Also wurde eine erste Testfeder zur Hand genommen, an der Palette angesetzt – und siehe da: Es funktionierte tatsächlich.

Vom Prototyp zur Patentlösung
Natürlich wurde die Idee anschließend auf Herz und Nieren geprüft. Der erste Prototyp – im hauseigenen 3D-Drucker gefertigt – lieferte bereits vielversprechende Ergebnisse. Doch es gab auch Rückschläge: Anfangs war das Material der Greiferteile nicht langlebig genug, die Prozesssicherheit ließ zu wünschen übrig. Aber: Das Team blieb dran. Immer wieder wurde optimiert, neue Testreihen gestartet, Slow-Motion-Aufnahmen ausgewertet, verschiedene Spiraldrehrichtungen ausprobiert – bis schließlich feststand: Die Linksspindel bringt den Durchbruch.
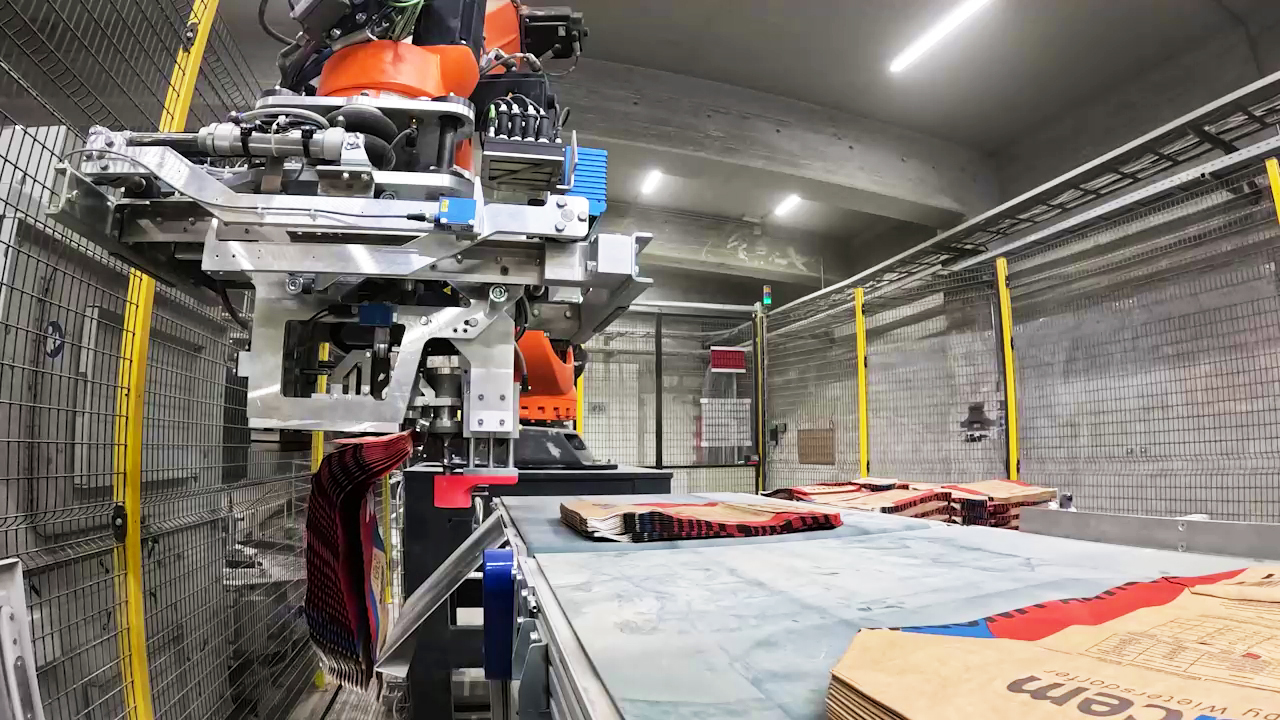
Das finale System besteht aus einem speziell entwickelten Greifer mit metallgedruckter Spirale und einem Gleitteller aus Kunststoff, um die Säcke sicher und ohne Beschädigung aufzunehmen. Ein echter Gamechanger – gerade in Kombination mit dem neuen Vision-System, das die genaue Position jedes Bündels erkennt und vermisst. Die Kombination aus intelligenter Bilderkennung und robuster Greiftechnik sorgt heute für eine zuverlässige, vollautomatische Vereinzelung – und das mit einer Verfügbarkeit von über 99,9 Prozent. „Ich muss zugeben, ich war selbst überrascht, wie prozesssicher das am Ende funktioniert hat“, sagt Andreas Lehmler. „Und ein bisschen stolz bin ich natürlich auch.“
Ein weiterer Clou des Systems: Die Vision-Technologie arbeitet komplett umgebungslichtunabhängig. Ob tiefste Nacht oder gleißender Sonnenschein – der Laserscanner bleibt unbeeindruckt und liefert konstant präzise Ergebnisse. Gleichzeitig können über die Software jederzeit neue Lagenbilder integriert, Plausibilitätsprüfungen durchgeführt und sogar Qualitätsmerkmale erfasst werden – etwa, ob die Paletten vom Lieferanten korrekt bestückt wurden.
Auch in der Praxis überzeugt das System auf ganzer Linie: Trotz schwankender Palettenqualität werden die Leersäcke zuverlässig depalettiert, die Packungsdichte ist hoch, der Footprint der Anlage bleibt kompakt – etwa drei mal fünf Meter – und der Kunde spart durch die optimierte Zuführung und Befüllung sogar Transportkosten – denn mehr Säcke auf den LKW = weniger Fahrten.
Der Kunde? Rundum zufrieden: „Ich hätte nie gedacht, dass eine so einfache Idee so zuverlässig funktionieren kann“, so Salonit. „Die Anlage läuft rund – und das bei unserem 24/7-Betrieb.“ Und das Beste an allem: Der Vereinzelungsmechanismus ist inzwischen patentiert. Das Design der Spirale, die Art des Untergreifens – all das ist nun offiziell geschützt. „Ein tolles Produkt“, findet Stephan Boll. „Und das Beste daran: Es ist ganz einfach. Einfach – und genial.“